ROS rviz工具使用¶
rviz是ros自带的一个图形化工具,可以方便的对ros的程序进行图形化操作,整体界面如下图所示 :
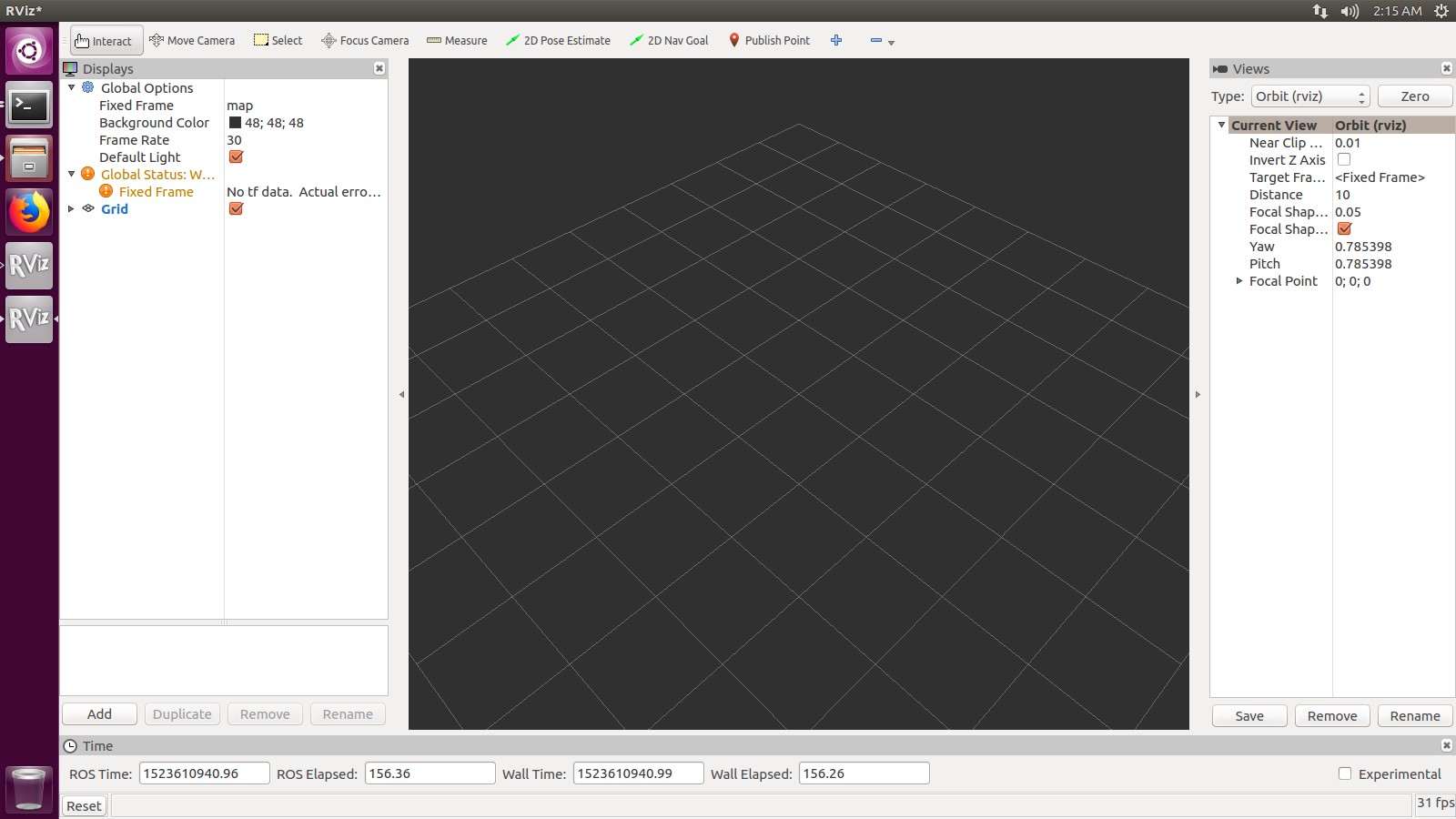
界面主要分为左侧的显示设置区域,中间的大的显示区域和右侧的视角设置区域。 最上面是和导航相关的几个工具。最下面是ros状态相关的一些数据的显示。
rviz使用前准备¶
开启ROS环境:
Roscore&
进入ros所在文件夹初始化环境变量:
source ./devel/setup.bash
运行launch文件:
roslaunch dmcam_ros start.launch
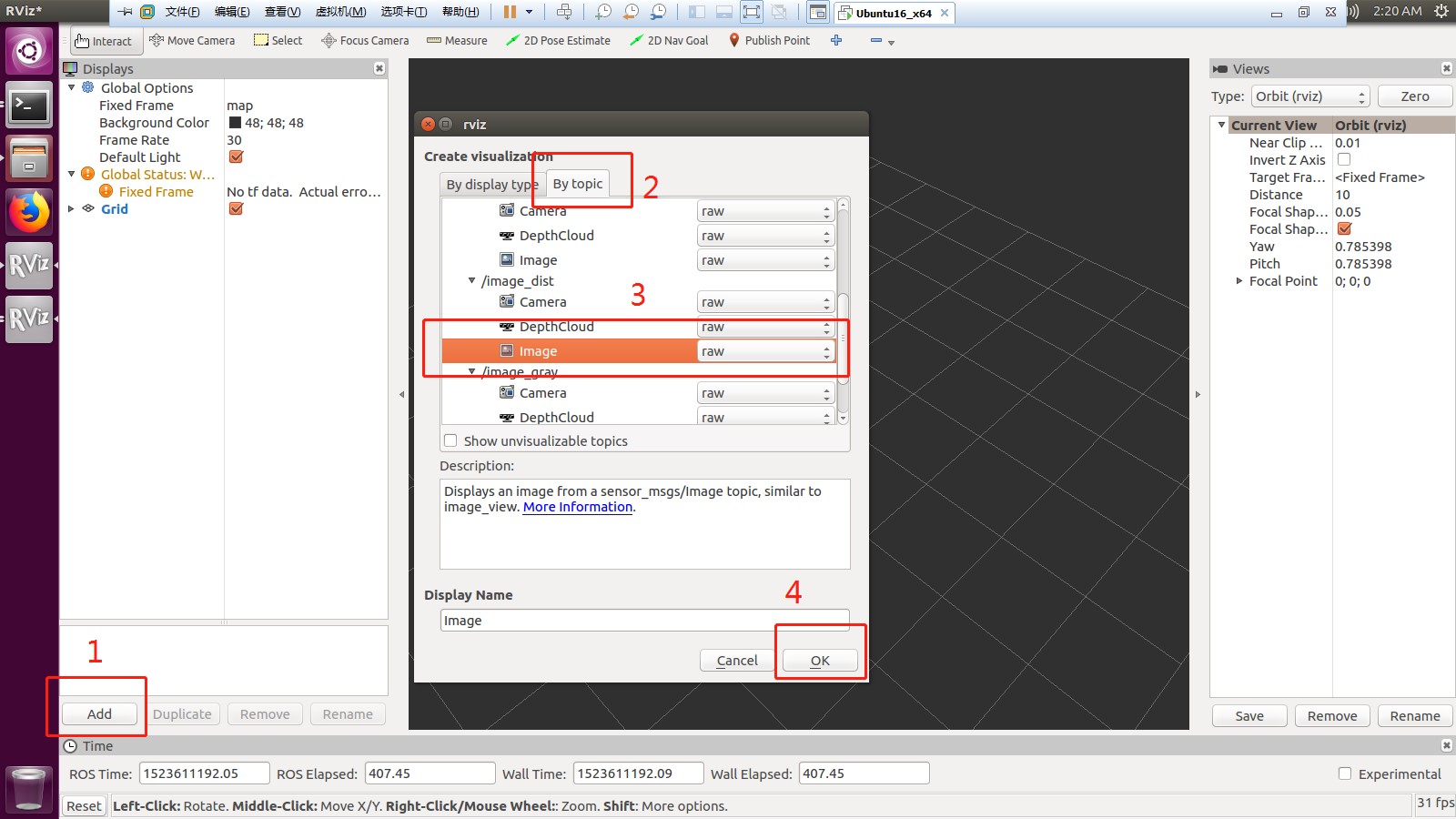
rviz显示深度图像¶
打开一个终端,运行rviz:
rviz选中add,By topic中选中image_dist下的Image,最后确认添加,如下图所示:
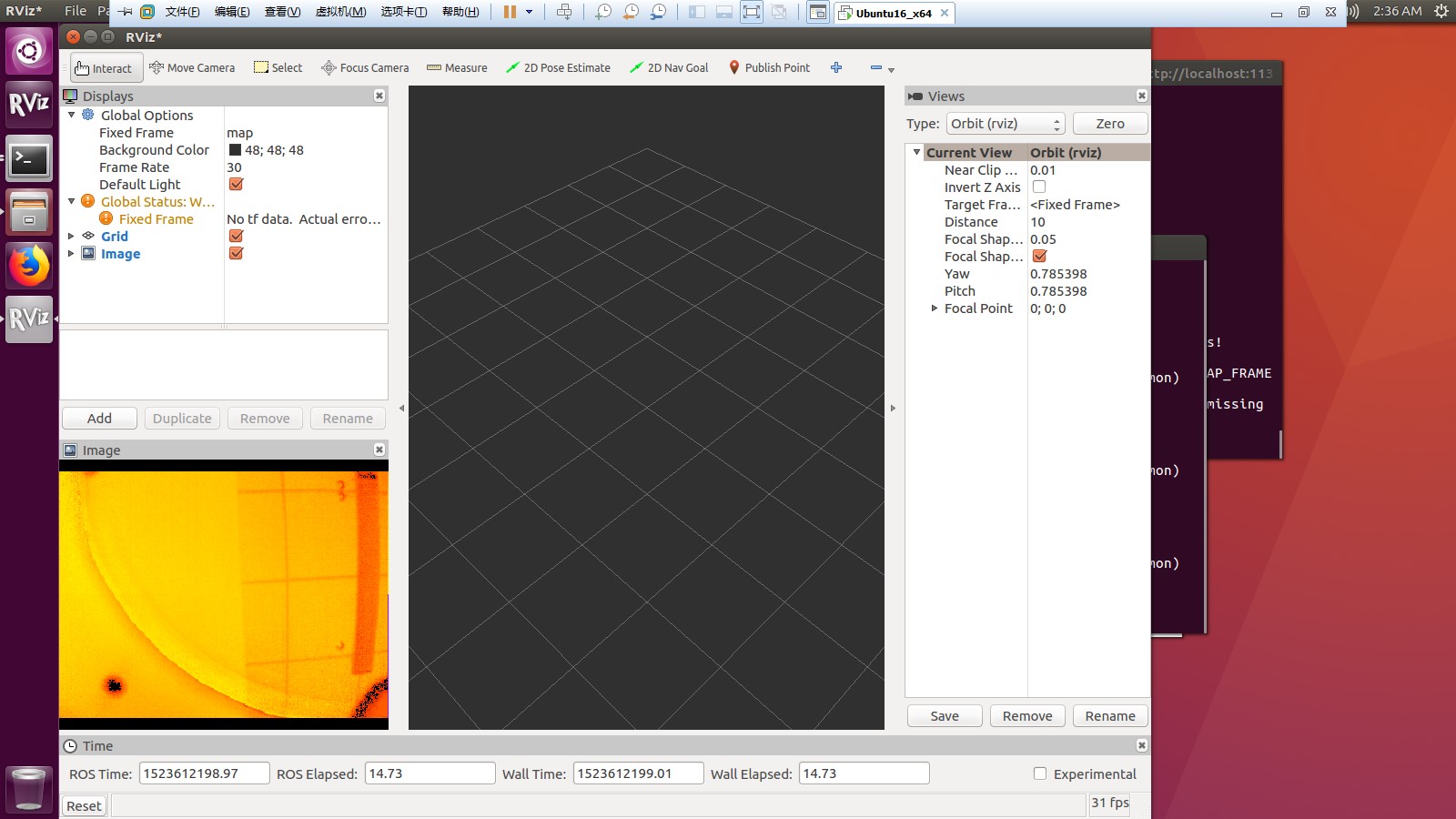
显示效果如下图所示:
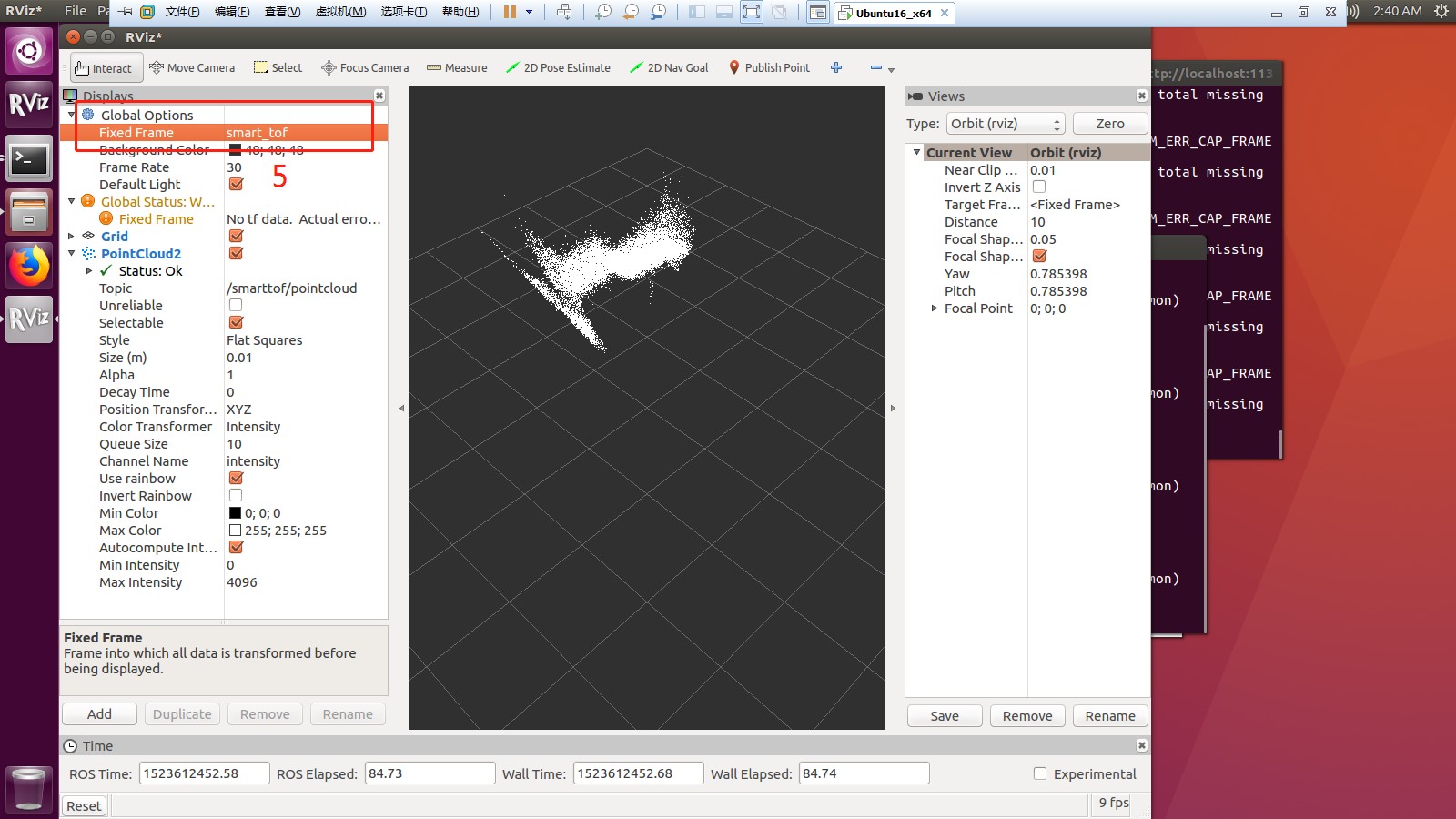
rviz显示点云图像¶
打开一个终端,运行rviz:
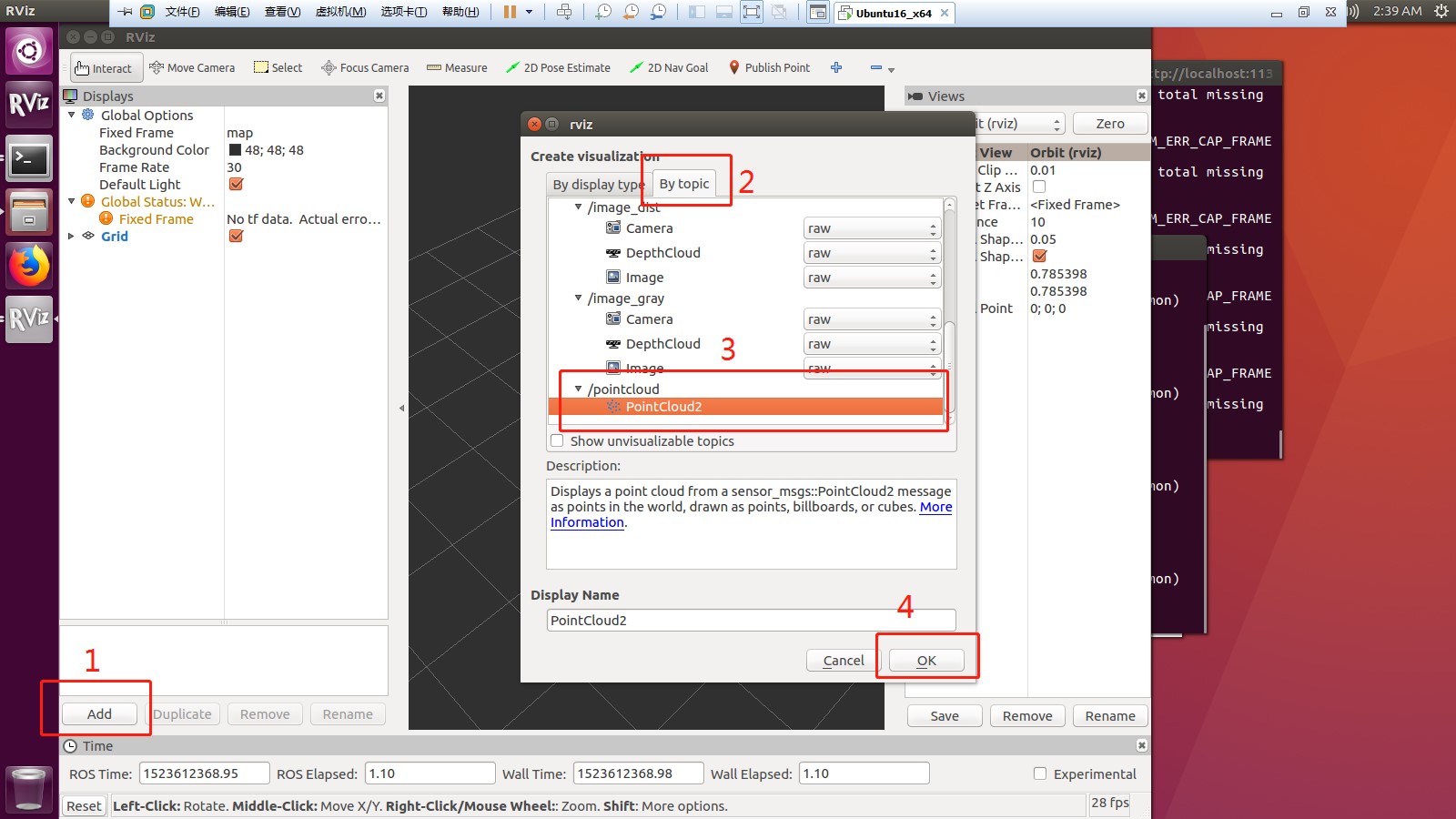
rviz选中add,byTopic中选中pointcloud下的PointCloud2,最后确认添加.
在rviz左上角的displays区域,修改GlobalOptions下的变量FixedFrame值为dmcam_ros,点云显示如下图