ROS灰度显示¶
开启ROS环境:
roscore&
进入ros所在文件夹初始化环境变量:
source ./devel/setup.bash
运行launch文件:
roslaunch dmcam_ros start.launch
显示灰度图命令:
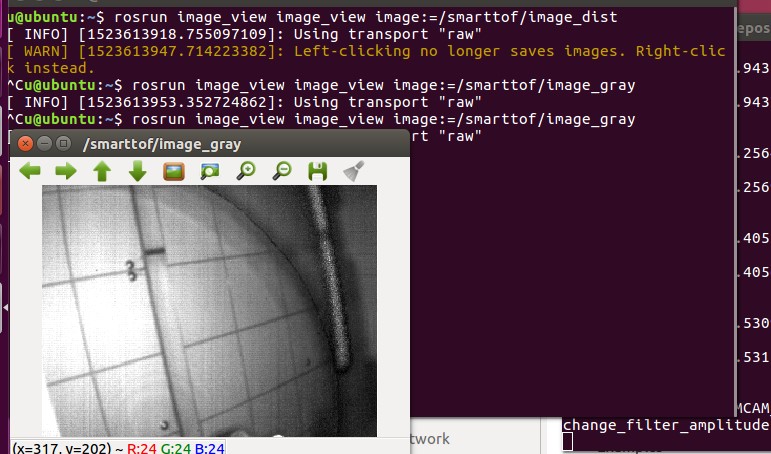
rosrun image_view image_view image:=/smarttof/image_gray
灰度图像显示如下:
开启ROS环境:
roscore&
进入ros所在文件夹初始化环境变量:
source ./devel/setup.bash
运行launch文件:
roslaunch dmcam_ros start.launch
显示灰度图命令:
rosrun image_view image_view image:=/smarttof/image_gray
灰度图像显示如下: