ROS点云显示¶
cloud_viewer是一个简单的使用smarttof ros来显示点云数据的样例, 这个样例简单的实现了怎么从smarttof ros发布的话题pointcloud中获取点云数据并显示出来。
开启ROS环境:
roscore&
进入ros所在文件夹初始化环境变量:
source ./devel/setup.sh
运行launch文件:
roslaunch cloud_viewer start.launch
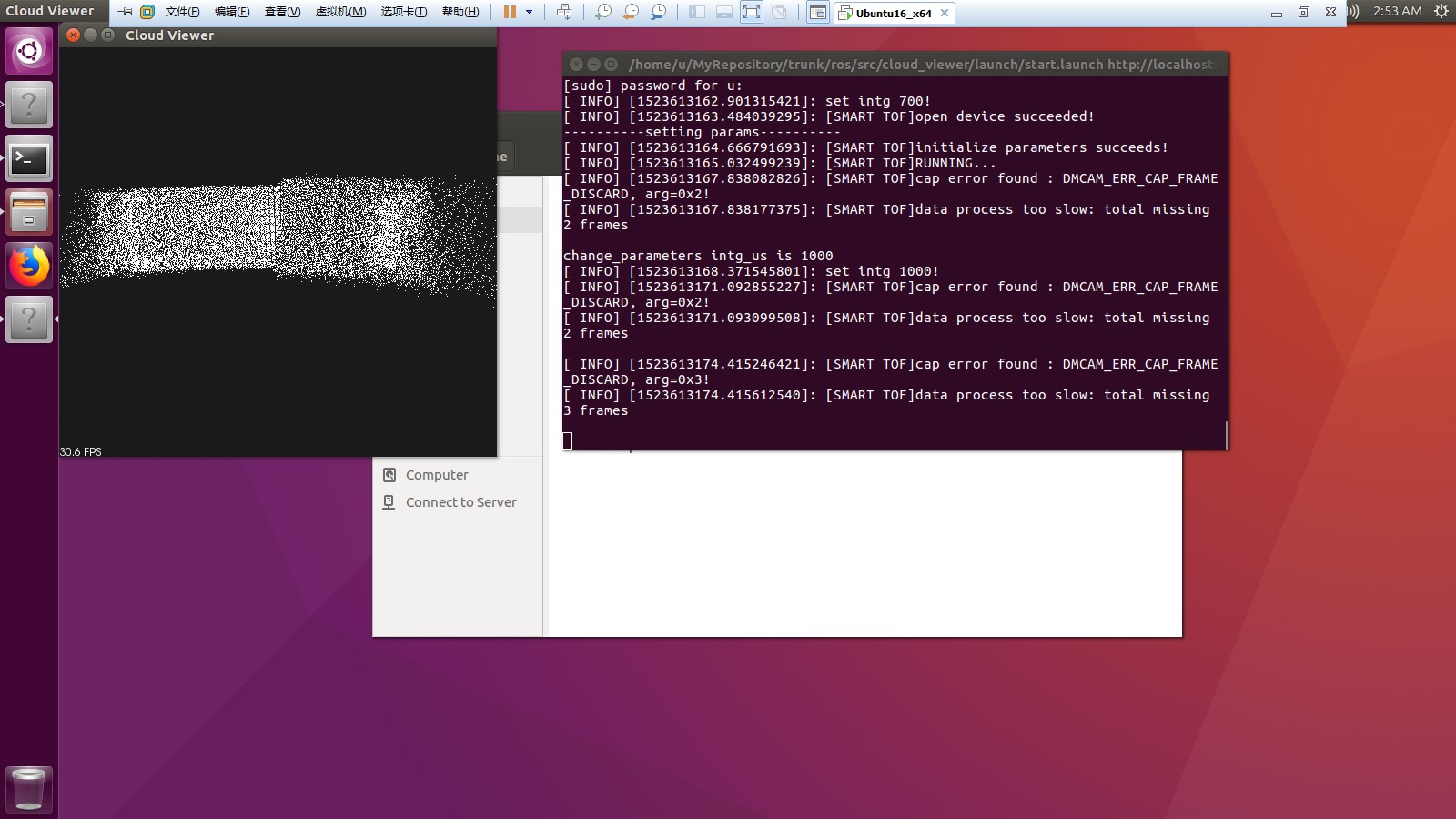
显示点云图像
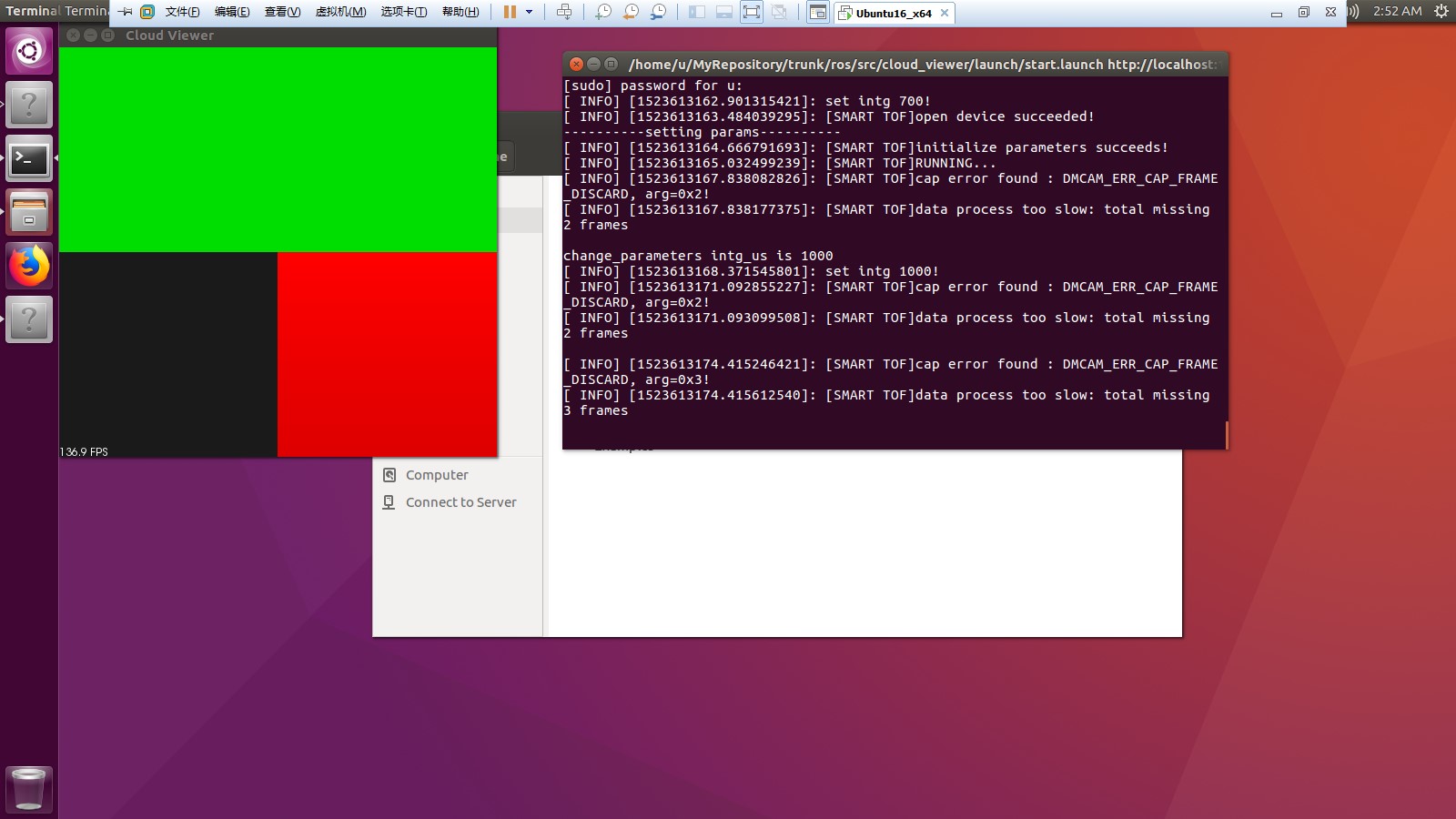
通过鼠标中间的滑轮和鼠标左键调整点云显示图像,最终效果如图