二次开发流程¶
基本采集数据¶
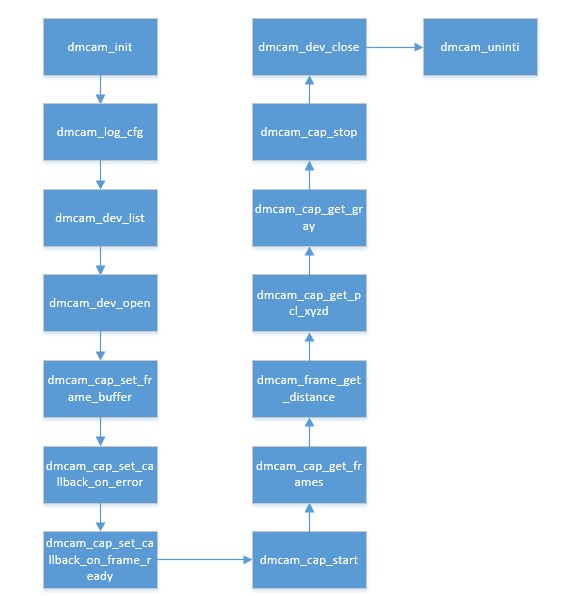
一般的数据采集采集流程包括设备初始化,日志配置,创建设备列表,打开 设备,采集原始数据,获取深度和灰度数据,获取点云数据关闭设备等操作。
参数设置和读取示例¶
模组的参数设置和读取分别通过调用dmcam_param_batch_set和dmcam_param_batch_get实现,可以设置积分时间、帧率等参数,也可读取模组信息、温度等参数,具体参数说明参考下面的的主要参数说明。
主要参数说明¶
模组的参数类型在dmcam_dev_param_e的枚举类型中,如下:
typedef enum {
PARAM_DEV_MODE = 0,
PARAM_MOD_FREQ,
PARAM_INFO_VENDOR,
PARAM_INFO_PRODUCT,
PARAM_INFO_CAPABILITY,
PARAM_INFO_SERIAL,
PARAM_INFO_VERSION, //HW&SW info
PARAM_INFO_SENSOR, //part version, chip id, wafer id
PARAM_INFO_CALIB, //get calibration info
PARAM_ROI, //ROI set/get
PARAM_FRAME_FORMAT, //frame information,eg.dcs1for gray,4 dcs for distance
PARAM_ILLUM_POWER, //illumination power set/get
PARAM_FRAME_RATE, //frame rate set/get
PARAM_INTG_TIME, //integration time set/get
PARAM_PHASE_CORR, //phase offset correction
//PARAM_SWITCH_MODE, /*>swith mode use[gray,3d]*/
PARAM_TEMP, //<Get camera temperature--------------
PARAM_HDR_INTG_TIME, //<Setting HDR integration time param
PARAM_SYNC_DELAY, //<delay ms for sync use
PARAM_ENUM_COUNT,
}dmcam_dev_param_e;
参数代码示例¶
进行参数设置:
dmcam_param_item_t wparam; uint16_t intg_time = 700; //表示设置积分的大小 范围为0-1500 memset(&wparam,0,sizeof(wparam)); wparam.param_id = PARAM_INTG_TIME; //表示设置的参数为积分时间 wparam.param_val_len = sizeof(intg_time); assert(dmcam_param_batch_set(dev,&wparam,1)); //调用API进行单个参数设置
进行参数读取:
dmcam_param_item_t rparam; memset(&rparam,0,sizeof(rparam)); rparam.param_id = PARAM_INTG_TIME; //表示要读取的参数项为积分时间 assert(dmcam_param_batch_get(dev,&rparam,1)); //调用API获取单个参数
滤波功能使用¶
SDK中支持对模组进行像素校准使能、最小幅值滤波、自动曝光等fliter功能的使用,filter类型参考dmcam_filter_id_e的说明。
主要滤波功能说明¶
模组的滤波类型在如下的枚举类型中:
typedef enum {
DMCAM_FILTER_ID_LEN_CALIB, /**>lens calibration*/
DMCAM_FILTER_ID_PIXEL_CALIB, /**>pixel calibration*/
DMCAM_FILTER_ID_MEDIAN, /**>Median filter for distance data*/
DMCAM_FILTER_ID_RESERVED, /**>Gauss filter for distance data*/
DMCAM_FILTER_ID_AMP, /**>Amplitude filter control*/
DMCAM_FILTER_ID_AUTO_INTG, /**>auto integration filter enable : use sat_ratio to adjust */
DMCAM_FILTER_ID_SYNC_DELAY, /**> sync delay */
DMCAM_FILTER_ID_TEMP_MONITOR, /**>temperature monitor */
DMCAM_FILTER_ID_HDR, /**>HDR mode */
DMCAM_FILTER_ID_OFFSET, /**> set offset for calc distance */
DMCAM_FILTER_ID_SPORT_MODE, /**> set sport mode */
//-------------------
DMCAM_FILTER_CNT,
}dmcam_filter_id_e;
滤波代码示例¶
像素校准,开启后用于深度数据的矫正:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_PIXEL_CALIB; //像素校准 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启像素校准 dmcam_filter_disable(dev,DMCAM_FILTER_ID_PIXEL_CALIB); //关闭像素校准
深度滤波,开启后用于对深度数据滤波:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_MEDIAN; //深度滤波 witem.median_ksize = 3; //深度滤波通常设置值 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启深度滤波 dmcam_filter_disable(dev,DMCAM_FILTER_ID_MEDIAN); //关闭深度滤波
幅值滤波,开启后过滤质量差的点:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_AMP; //最小幅值滤波 witem.min_amp = 30; //设置的最小幅值滤波的阈值 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启最小幅值滤波 dmcam_filter_disable(dev,DMCAM_FILTER_ID_AMP); //关闭最小幅值滤波
自动积分时间,开启后根据被测物体的距离自动调整曝光时间大小:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_AUTO_INTG; //自动曝光 witem.sat_ratio = 5;//自动曝光时设置的值 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启自动曝光 dmcam_filter_disable(dev,DMCAM_FILTER_ID_AUTO_INTG); //关闭自动曝光
多模组串扰消除,开启消除或者减小多模组同时开启时的串扰:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_SYNC_DELAY; //串扰延时 witem.sync_delay = 0; //延时时间设为0时为随机时间 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启串扰延时 dmcam_filter_disable(dev,DMCAM_FILTER_ID_SYNC_DELAY); //关闭串扰延时
运动模式0,帧格式要设置为2:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_SPORT_MODE; //运动模式0 dmcam_param_item_t wparam; uint32_t set_format = 2; //表示要设置的帧格式为2 memset(&wparam,0,sizeof(wparam)); wparam.param_id = PARAM_FRAME_FORMAT; //表示设置的参数为帧格式 wparam.frame_format.format = set_format; //设置的帧格式为2 wparam.param_val_len = sizeof(set_format); assert(dmcam_param_batch_set(dev,&wparam,1)); //调用API进行帧格式参数设置 witem.sport_mode = 0; //设置运动模式为0 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启运动模式0 dmcam_filter_disable(dev,DMCAM_FILTER_ID_SPORT_MODE);//关闭运动模式0
运动模式1,帧格式要设置为4:
dmcam_filter_args_u witem; dmcam_filter_id_e filter_id = DMCAM_FILTER_ID_SPORT_MODE; //运动模式1 dmcam_param_item_t wparam; uint32_t set_format = 4; //表示要设置的帧格式为4 memset(&wparam,0,sizeof(wparam)); wparam.param_id = PARAM_FRAME_FORMAT; //表示设置的参数为帧格式 wparam.frame_format.format = set_format; //设置的帧格式为4 wparam.param_val_len = sizeof(set_format); assert(dmcam_param_batch_set(dev,&wparam,1)); //调用API进行帧格式参数设置 witem.sport_mode = 1; //设置运动模式为1 dmcam_filter_enable(dev,filter_id,&witem,sizeof(dmcam_filter_args_u));//开启运动模式1 //关闭运动模式1时,帧格式要先恢复到2 set_format = 2; //帧格式要恢复设置为2 wparam.frame_format.format = set_format; //设置的帧格式的值为2 wparam.param_id = PARAM_FRAME_FORMAT; //表示设置的参数为帧格式 wparam.param_val_len = sizeof(set_format); assert(dmcam_param_batch_set(dev,&wparam,1)); //调用API进行帧格式参数设置2 dmcam_filter_disable(dev,DMCAM_FILTER_ID_SPORT_MODE);//关闭运动模式1